


Files
Download Full Text (919 KB)
Abstract
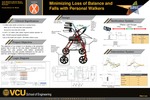
Falls within the Older Adult community lead to roughly 734,000 hospital admissions annually with 87% attributed to walker use. In order to reduce the amount of falls due to walker use our objective was to create a system that detects an increased likelihood of a fall occurring, notifies the user of improper positioning, and can intervene by application of an automatic braking system to stabilize the walker; effectively training the user to have a more proper walking form and posture reducing the risk of a fall. In order to accomplish this goal, final deliverables included a working prototype and validation test results demonstrating proper specifications for notification of position, reduction of acceleration, and low light visibility. The final design incorporated an ultrasonic sensor, accelerometer, and ambient light sensor to detect user activity, position, and brightness. Then, communicated through an Arduino microcontroller to determine if safe thresholds had been breached, resulting in the activation of two solenoids and arrest of the walker’s movement. LEDs illuminate in low light environments to ease the burden of finding the walker in the dark, as well as illuminate the path of motion when the walker was in use. The prototype utilized the best selling walker available on the market, and was assessed by team members for efficacy. Final results demonstrate proper notification of position, increased visual acuity in response to environmental stimuli, and a reduced acceleration due to the braking system.
Publication Date
2016
Keywords
biomedical engineering, walkers
Disciplines
Biomedical Engineering and Bioengineering | Engineering
Faculty Advisor/Mentor
Dr. Paul A. Wetzel
VCU Capstone Design Expo Posters
Rights
© The Author(s)
Date of Submission
August 2016